MIT’s New Robot Gripper Grabs Objects Like a Venus Flytrap





Much more complex than they look on on the surface, our hands consist of many mechanisms working in concert with each other. Among them are the muscles and tendons that facilitate flexibility, the signals from our brains that tell them how to operate, the tiny grooves in our skin that give our fingers grip, and the skeletal system that allows us to pick up heavy objects. Even after decades of research and experimentation, scientists are barely starting to figure out how to create robotic hands that can mimic the real thing, with the right amount of dexterity and force — but MIT has just gotten a lot closer, and their solution is pretty surprising.
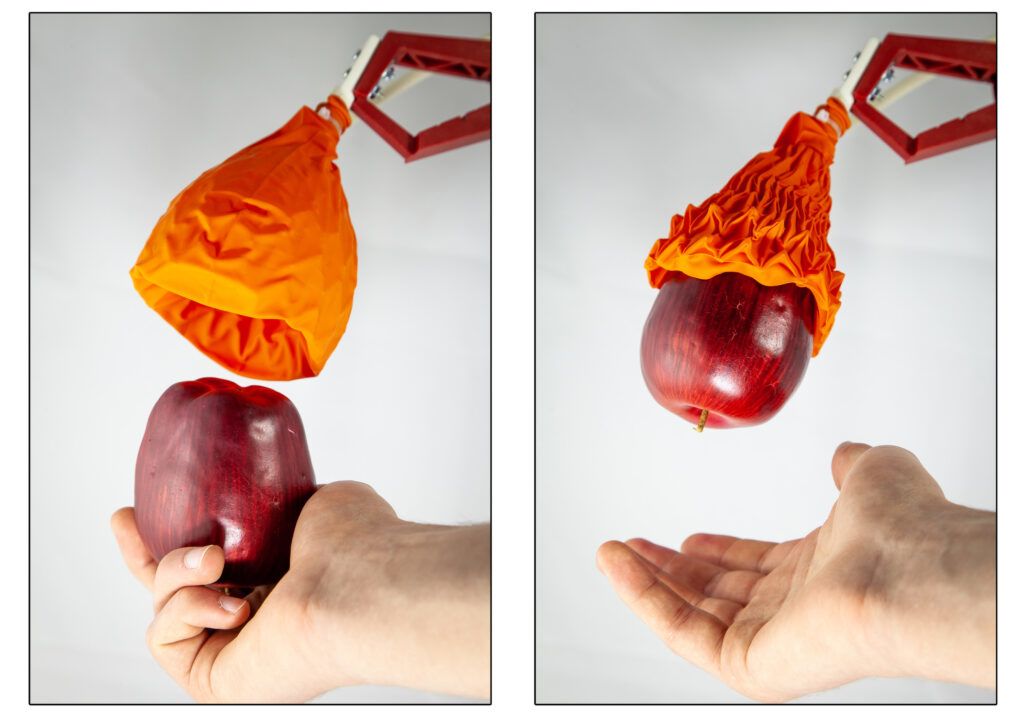
Instead of trying to replicate the way our own hands work, a new project out of MIT and Harvard takes inspiration from both the Venus flytrap and a particular origami folding technique. The result is a plastic and rubber structure with a soft “skeleton” inside that uses a simple vacuum to contract around an object like a muscle. Its flexibility allows it to grip all sorts of objects, even those with irregular shapes, no matter how fragile they are. MIT has already showcased the cone-shaped gripper in action, instructing it to pick up things like water bottles, bananas, stuffed animals, power tools, and iPhones.
The gripper can lift objects that are as much as 100 times its own weight thanks to the suction achieved when its 3D-printed origami structure flexes to adapt to the shape of whatever object it’s grabbing. This airtight skin, made of a special heat-shrinking plastic that self-folds at high temperatures, keeps the object it’s holding secure. While rigid robotic grippers can only pick up certain kinds of objects and softer ones don’t have enough holding power, MIT’s new creation is able to achieve unprecedented levels of both grip and strength.
“One of my moonshots is to create a robot that can automatically pack groceries for you,” says Daniela Rus, director of MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL), and one of the senior authors of a paper about the gripper.

“Previous approaches to the packing problem could only handle very limited classes of objects — objects that are very light or objects that conform to shapes such as boxes and cylinders, but with the Magic Ball gripper, system we’ve shown that we can do pick-and-place tasks for a large variety of items ranging from wine bottles to broccoli, grapes, and eggs. In other words, objects that are heavy and objects that are light. Objects that are delicate, or sturdy, or that have regular or free-form shapes.”

As you might notice in the video, there is one glaring limitation to this design. Because it doesn’t have “fingers” of any kind, the origami robot gripper has trouble picking up objects that are flat, like books, unless they’re handed to it in an upright position. MIT says it currently works best with cylindrical objects like bottles and cans, so it could someday be used for production lines in factories, but its possibilities certainly don’t end there.
“This is a very clever device that uses the power of 3D printing, a vacuum, and soft robotics to approach the problem of grasping in a whole new way,” says Michael Wehner, an assistant professor of robotics at UC Santa Cruz who was not involved in the project. “In the coming years, I could imagine seeing soft robots gentle and dexterous enough to pick a rose, yet strong enough to safely lift a hospital patient.”